Title here
Summary here
ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills

arXiv Link: ASAP Paper
Description: 人形机器人对高敏捷人类行为的模仿学习。
TWIST: Teleoperated Whole-Body Imitation System
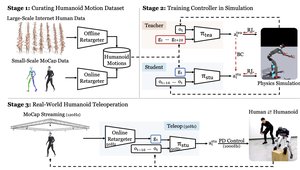
arXiv Link: TWIST Paper
Description: 人形机器人全身遥操作。
OpenVLA: An Open-Source Vision-Language-Action Model
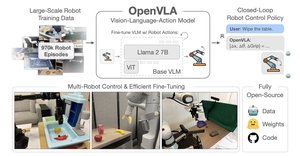
arXiv Link: Open-VLA Paper
Description: 具身操作VLA foundation model
Fine-Tuning Vision-Language-Action Models: Optimizing Speed and Success
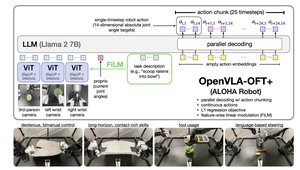
arXiv Link: Open-VLA-OFT Paper
Description: 具身操作VLA foundation model
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation

arXiv Link: RDT Paper
Description: 双臂协同操作foundation model。
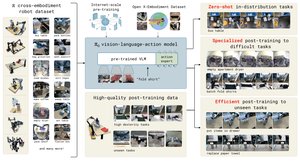
UNLEASHING LARGE-SCALE VIDEO GENERATIVE PRE-TRAINING FOR VISUAL ROBOT MANIPULATION
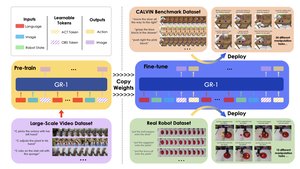
arXiv Link: GR-1 Paper
GR-2: A Generative Video-Language-Action Model with Web-Scale Knowledge for Robot Manipulation
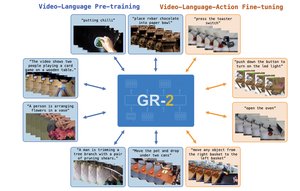
arXiv Link: GR-2 Paper
GR-3 Technical Report

arXiv Link: GR-3 Paper
Description: 字节跳动提出的基于大规模视频预训练模型
π0: A Vision-Language-Action Flow Model for General Robot Control
arXiv Link: π0 Paper
Description: PI系列VLA关键工作
π0.5: a Vision-Language-Action Model with Open-World Generalization

arXiv Link: π0.5 Paper
Description: PI系列VLA关键工作
RoboTwin: Dual-Arm Robot Benchmark with Generative Digital Twins
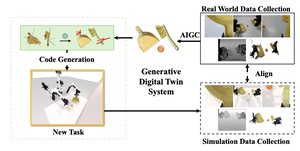
arXiv Link: RoboTwin Paper
Description: 最佳仿真平台。
RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Randomization for Robust Bimanual Robotic Manipulation
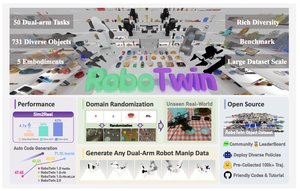
arXiv Link: RoboTwin2.0 Paper
Description: 最佳仿真平台升级版。
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots

arXiv Link: RoboCasa Paper
Description: 最佳仿真平台升级版。
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
arXiv Link: RoboVerse Paper
Description: 仿真平台集成。
Last updated: Aug 2025